FEATURED
Mar 16 · npj Robotics
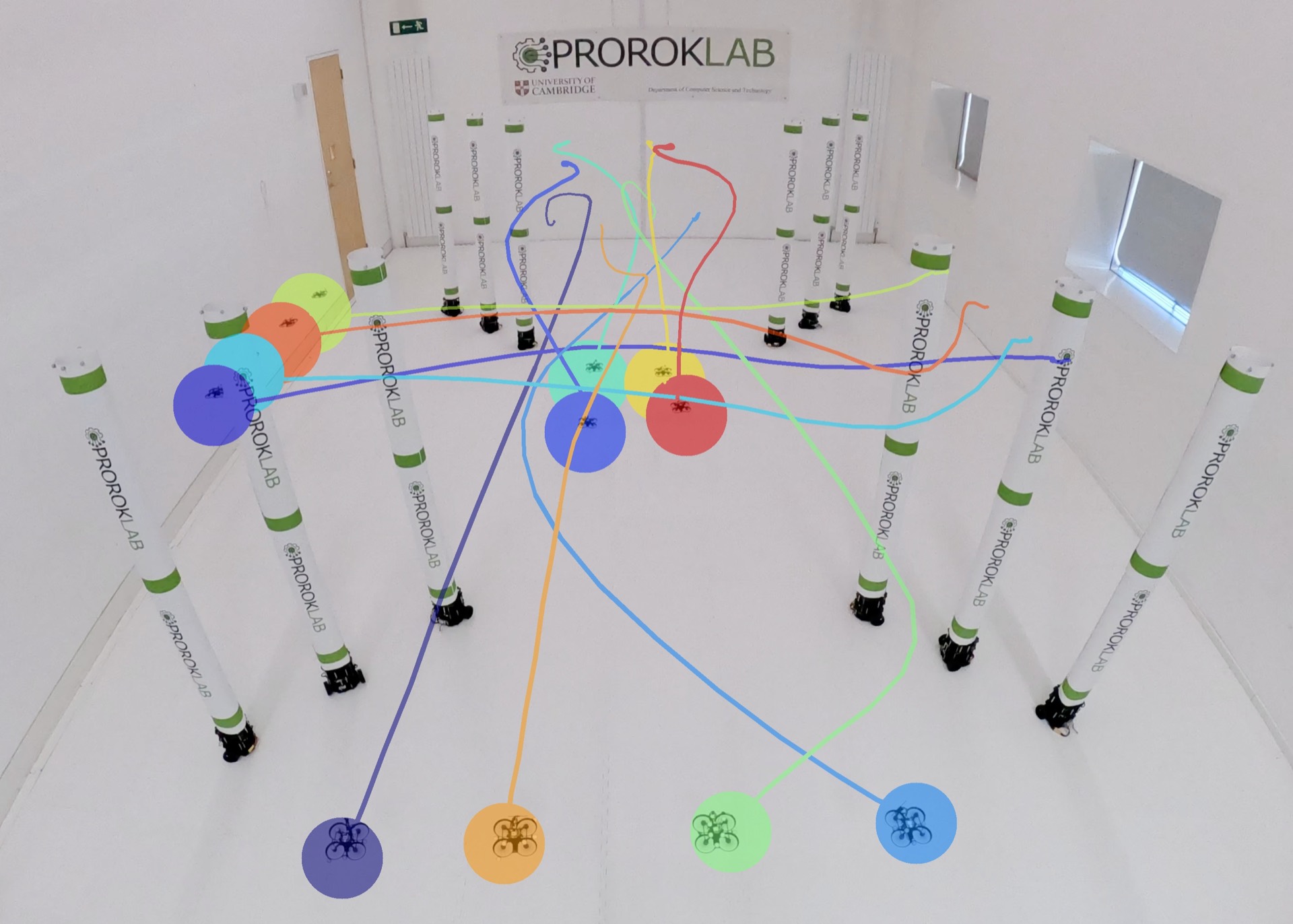
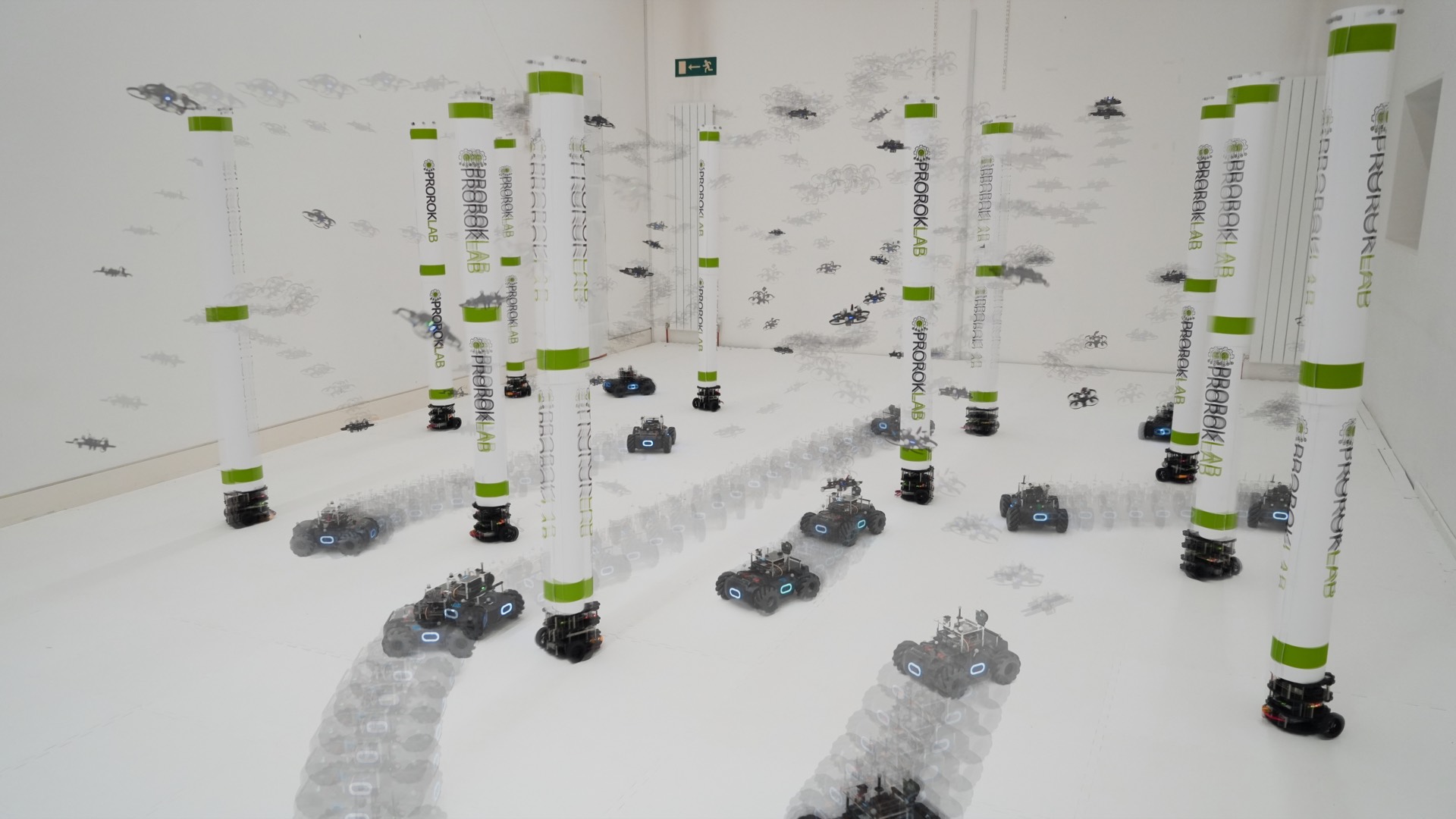
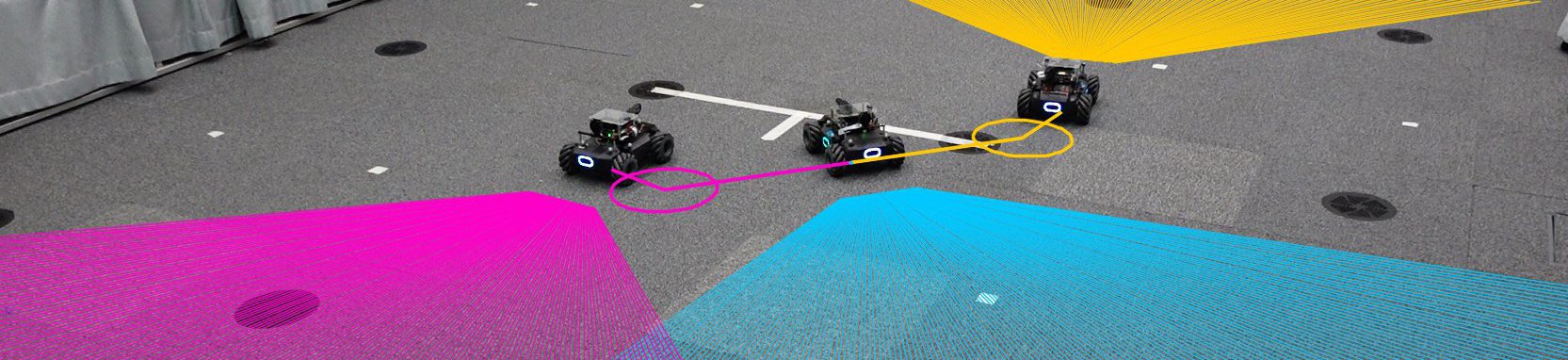
Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers
Keisuke Okumura, Guang Yang, Zhan Gao, Heedo Woo, Amanda Prorok
We present concrete planning, a hybrid approach that captures real-world continuous dynamics while maintaining scalable guaranteed planning via discrete search. The framework integrates advances in robot dynamics learning, optimal control, and anytime complete planning into a modular system deployed with 40 robots — 20 aerial, 8 ground, and 12 obstacle robots — operating in a compact laboratory space.